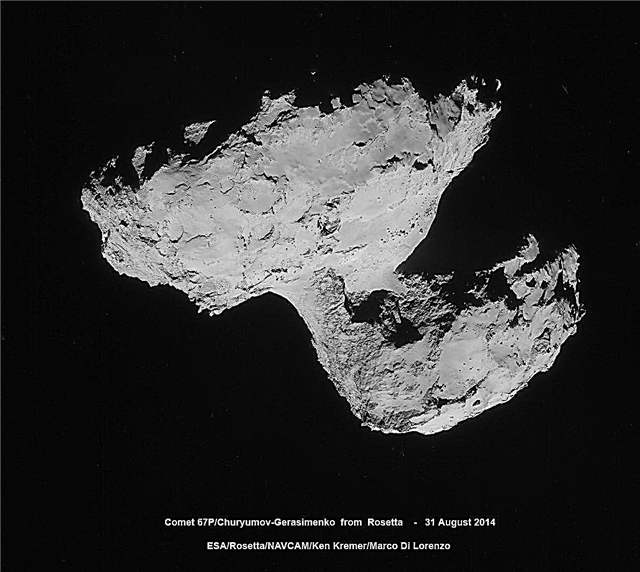
Mosaik gambar empat gambar yang terdiri daripada gambar yang diambil oleh kamera navigasi Rosetta pada 31 Ogos 2014 dari jarak 61 km dari komet 67P / Churyumov-Gerasimenko. Inti komet terletak sekitar 4 km.
Kredit: ESA / Rosetta / NAVCAM / Ken Kremer - kenkremer.com/Marco Di Lorenzo
Lihat versi berputar dan 4 gambar individu di bawah [/ caption]
Pengorbit Rosetta ESA kini telah bergerak begitu dekat dengan kuari kometnya sehingga badan primordial memenuhi layar, dan dengan itu mosaik pemetaannya yang pantas untuk menangkap pemandangan lengkap dunia pelik sehingga dapat menemukan tempat yang paling sesuai untuk pendaratan Philae yang sangat penting - akan datang pada pertengahan November.
Malahan Rosetta telah 'melukis dan memisahkan' komet untuk mengumpulkan paparan resolusi tinggi Komet 67P / Churyumov-Gerasimenko dengan kamera navcam pada hari Ahad, 31 Ogos.
Kuartet navcam baru sahaja diposkan ke portal Rosetta hari ini, Isnin, 1 September 2014. ESA menjemput pembaca untuk membuat mosaik gambar global.
Lihat di atas empat bingkai foto mozek gambar navcam yang diambil Rosetta pada 31 Ogos.
Tujuan mengambil gambar serta spektrum dan pengukuran fizikal dari dekat adalah untuk mencari laman penyentuhan Philae yang ‘layak secara teknikal’ yang selamat dan menarik secara saintifik.
Di bawah ini adalah pasukan Rosetta empat montaj gambar navcam, disusun secara berasingan dalam raster 2 x 2.

Urutan raster gambar navcam diambil dari jarak 61 km dari komet 67P.
"Kira-kira satu perempat komet dilihat di sudut masing-masing dari empat gambar. Keempat gambar diambil dalam jangka masa kira-kira 20 minit, yang bermaksud bahawa ada gerakan kapal angkasa dan putaran komet antara gambar. Hasilnya, membuat mosaik bersih dari keempat gambar itu tidaklah mudah, ”menurut blog Rosetta ESA.
Seperti yang saya laporkan di sini minggu lalu, calon lokasi pendaratan 'Top 5' telah dipilih untuk orbit Rosetta yang mengayuh Philae pendaratan untuk percubaan pertama umat manusia mendarat di komet.
Tapak touchdown yang berpotensi diumumkan pada 25 Ogos, berdasarkan analisis menyeluruh mengenai ukuran resolusi tinggi yang dikumpulkan oleh kapal angkasa Rosetta ESA pada minggu-minggu sebelumnya sejak ia tiba di Komet 67P / Churyumov-Gerasimenko pada 6 Ogos 2014.
Lihat montaj laman pendaratan ‘Top 5’ kami di bawah.

Rosetta adalah misi banyak yang pertama, termasuk percubaan pertama dalam sejarah untuk mengorbit komet untuk kajian jangka panjang.
Sejarah pelayaran Philae di komet 67P kini dijadualkan sekitar 11 November 2014, dan akan sepenuhnya automatik. Pendarat 100 kg dilengkapi dengan 10 instrumen sains.
Imej baru yang dikeluarkan hari ini adalah yang terbaik yang diambil oleh kamera Navcam. Probe kamera sains OSIRIS lebih terperinci, dan mudah-mudahan akan dikeluarkan oleh ESA tidak lama lagi!
"Ini adalah kali pertama laman pendaratan komet dipertimbangkan," kata Stephan Ulamec, Pengurus Lander di DLR (Pusat Aeroangkasa Jerman), dalam pernyataan ESA.
Sejak bertemu dengan komet setelah mengejar satu dekad lebih dari 6,4 miliar kilometer (4 Miliar batu), tugas keutamaan bagi pasukan sains dan kejuruteraan yang memimpin Rosetta adalah "Mencari jalur pendaratan" untuk pendarat komet Philae.
"Jam berdetik" untuk memilih zon pendaratan yang sesuai tidak lama lagi kerana komet memanaskan badan dan permukaannya menjadi lebih aktif kerana berayun mendekati matahari dan menjadikan pendaratan semakin berbahaya.

Pendarat berkaki tiga akan menembak dua harpo dan menggunakan skru ais untuk berlabuh ke permukaan komet selebar 4 kilometer (2.5 batu). Philae akan mengumpulkan gambar stereo dan panorama dan juga menggerudi 23 sentimeter ke dalam dan mengambil contoh permukaannya yang sangat bervariasi.
Nantikan berita mengenai sains Rosetta, Bumi dan Planetari yang berterusan dan berita penerbangan angkasa manusia.


Baca siri Rosetta saya di sini: