The Woods Hole Oceanographic Institution (WHOI) mengatakan robot bawah laut mereka baru sahaja menyelesaikan operasi pensampelan bawah air automatik yang pertama. Robot itu dipanggil Nereid Under Ice (NEI) dan ia mengumpulkan sampel di Yunani. WHOI sedang membangunkan Nereid bekerjasama dengan program Planetary Science and Technology dari Analog Research (PSTAR) NASA.
NUI sedikit lebih kecil daripada sebuah Smart Car, dan beratnya sekitar 1800 kg (3960 lbs.) Dan ia melakukan beberapa karya ilmiah penting di Bumi. Dalam misi bulan lalu, ia mengumpulkan sampel dari Kolombo Volcano, sebuah gunung berapi bawah laut yang aktif berhampiran Pulau Santorini di Yunani. Sebahagian dari lantai kawah adalah ladang hidrotermal yang ditutup dengan tikar bakteria tebal. Sampel NUI yang dikumpulkan akan digunakan untuk mengkaji kehidupan mikroba.
"Salah satu tujuan kami adalah membuang tongkat Joystick, dan kami dapat melakukan itu."
Rich Camilli, Saintis Bersekutu WHOI, Ketua Pembangunan Teknologi Automasi
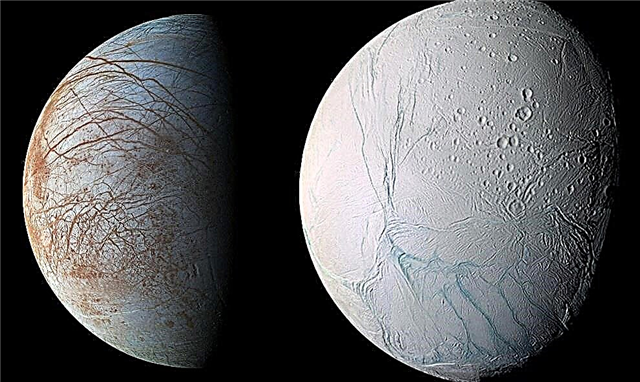
Pembangunan NUI bermula dari tuntutan misi masa depan hingga beberapa bulan di Sistem Suria kita, seperti Europa dan Ganymede, yang memiliki lautan bawah permukaan. Menjelajahi dunia-dunia tersebut memerlukan robot jenis baru yang dapat berfungsi secara automatik di bawah air, dan bukannya bergerak di permukaan.
Rich Camilli adalah saintis bersekutu di WHOI yang memimpin pengembangan teknologi automasi sebagai sebahagian daripada program penyelidikan interdisipliner Sains dan Teknologi Planet dari Analog Research (PSTAR) NASA. Dalam siaran pers, Camilli mengatakan, "Untuk kenderaan mengambil sampel tanpa juruterbang mengemudi, itu adalah langkah besar untuk maju. Salah satu tujuan kami adalah membuang tongkat kegembiraan, dan kami dapat melakukannya. ”

Dengan munculnya kenderaan memandu sendiri, kita terbiasa dengan idea kenderaan automatik. Tetapi persekitaran bawah laut jauh berbeza - dan jauh lebih berbahaya - daripada jalan permukaan berturap. Membangunkan kecerdasan buatan yang cukup kuat untuk persekitaran itu adalah satu cabaran. Camilli adalah sebahagian daripada pasukan penyelidik antarabangsa yang mengkaji kehidupan di Kolombo, persekitaran yang kaya dengan bahan kimia. Tetapi Camilli juga ada di sana untuk mengetahui lebih lanjut mengenai bagaimana robot autonomi dapat menjelajahi persekitaran bawah laut.
Kepintaran buatan NUI merangkumi perancang perisian yang disebut "Spock." Spock membolehkan NUI tidak hanya mengambil sampel secara autonomi, tetapi juga memilih laman web terbaik untuk sampel tersebut. Pada bulan yang jauh, di lautan bawah permukaan, jenis AI canggih jenis ini diperlukan.
"Sekiranya kita mempunyai visi besar ini untuk mengirim robot ke tempat-tempat seperti Europa dan Enceladus, mereka akhirnya perlu bekerja secara bebas seperti ini dan tanpa bantuan juruterbang."
Gideon Billings, Universiti Michigan
Gideon Billings adalah pelajar tamu dari University of Michigan yang penyelidikan tesisnya memfokuskan pada teknologi automatik. Kod Billings digunakan untuk mengumpulkan sampel pertama ini. Dia mengeluarkan satu perintah kepada manipulator autonomi NUI, dan NUI melakukan yang lain. Dalam beberapa saat, NUI mengulurkan lengan robotnya dan menggunakan sampel slurp-hose untuk menyedut beberapa bahan.
Billings memahami bahawa sebarang misi untuk mempelajari lautan bawah permukaan seperti bulan Eropah akan memerlukan teknologi khusus yang sangat maju, termasuk AI yang canggih. "Sekiranya kita mempunyai visi besar ini untuk mengirim robot ke tempat-tempat seperti Europa dan Enceladus [masing-masing bulan Musytari dan Saturnus], mereka akhirnya perlu bekerja secara bebas seperti ini dan tanpa bantuan juruterbang," katanya.

Diperlukan 35 minit untuk isyarat radio sampai ke Musytari dari Bumi, jadi komunikasi berulang-ulang akan memakan masa lebih dari satu jam. Adalah penting bahawa robot penerokaan dapat "berfikir" sendiri untuk jangka masa tertentu, menyelesaikan tugas dan mengelakkan bahaya. Untuk mencapai tujuan tersebut, Billings dan yang lain akan terus berusaha menggunakan AI. Tujuan mereka adalah untuk "melatih" robot untuk melihat seperti juruterbang ROV (Kendaraan yang Dikendalikan dari Jauh) dengan teknologi "tatapan pandangan". Mereka juga ingin membina bahasa antara muka mesin-mesin yang kuat supaya para saintis dapat berbicara terus dengan kenderaan robot, tanpa memerlukan juruterbang untuk menerjemahkan perintah.
Visi adalah untuk sekumpulan ROV seperti Nereid Under Ice bekerjasama.
"Kami akhirnya dapat melihat memiliki rangkaian robot lautan kognitif di mana terdapat kecerdasan bersama yang merangkumi seluruh armada, dengan setiap kenderaan bekerja sama seperti lebah di sarang," kata Camilli. "Ini akan melampaui kehilangan kayu bedik."
NUI telah dibangunkan selama beberapa tahun. Ia telah diuji di Kutub Utara, di mana ia melakukan perjalanan di bawah ais dan mengumpulkan data mengenai kawasan pemanasan. NUI dapat bergerak lebih jauh di bawah ais daripada kenderaan sebelumnya.
NUI dapat menempuh jarak sejauh 40 km (25 batu) di bawah air, jauh lebih jauh daripada beberapa ratus kaki khas ROV lain. Apabila dihubungkan dengan kabel gentian optik nipis, ia dapat menghantar video definisi tinggi kembali ke kapal induknya. Ia mempunyai rangkaian lengkap sensor akustik, kimia, dan biologi, dan lengan manipulator tujuh fungsi. Ia dapat menyelam hingga kedalaman 2.000 meter (6500 kaki.)
Lagi:
- Siaran Akhbar: Robot bawah laut WHOI mengambil sampel automatik pertama yang diketahui dari lautan
- WHOI: HROVNereid Di Bawah Ais
- Space Magazine: Pemacu Akuatik Rover di Bahagian Bawah Ais di Antartika