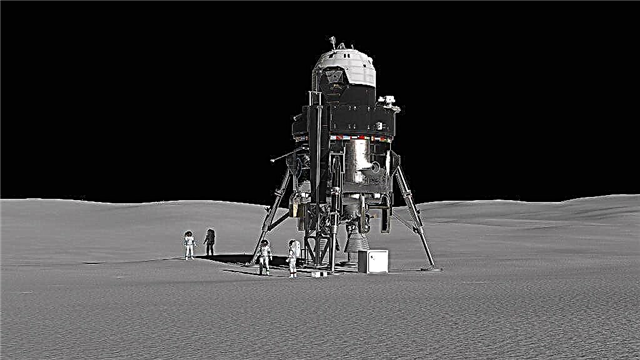
ESA telah menghabiskan beberapa tahun kebelakangan ini untuk mewujudkan pangkalan lunar antarabangsa, sesuatu yang akan berfungsi sebagai penerus rohani Stesen Angkasa Antarabangsa (ISS). Untuk mencapainya, mereka telah meminta bantuan agensi dan kontraktor angkasa lain untuk mengembangkan konsep untuk habitat ruang dan kaedah pembinaan serta cara untuk memberikan sokongan robotik dan logistik.
Baru-baru ini, Elemen Pembangunan Teknologi ESA (TDE) menandatangani perjanjian dengan pemaju teknologi Perancis COMEX untuk membuat sistem robot TRAILER. Projek dua tahun ini akan menguji seni bina misi baru di mana dua penemu bekerja bersama-sama (dan dengan bantuan angkasawan) demi menjelajahi permukaan bulan dan membina pos tetap di Bulan.
Sistem TRAILER akan memanfaatkan sejumlah kemajuan terbaru dalam bidang robotik, operasi jarak jauh, dan perisian autonomi. Robot tandem dirancang untuk dikendalikan dari Bumi atau dari pangkalan di orbit lunar - iaitu Lunar Gateway. Namun, mereka juga diminta untuk beroperasi secara autonomi untuk jangka masa dan melakukan tugas tanpa angkasawan mengawasinya.

Pada akhirnya, TRAILER direka untuk menguji sistem penjelajah robot yang terdiri daripada dua elemen, yang dikenali sebagai TRACTOR dan WAIN. Yang pertama memerlukan elemen rover lincah yang mampu menjelajah ke permukaan untuk jangka waktu yang singkat, mendapatkan sampel untuk analisis, dan berkomunikasi melalui pemancar wayarles tempatan.
Sementara itu, elemen WAIN akan terdiri daripada treler aktif yang akan menyediakan asas operasi untuk rover dan terhad dari segi mobiliti dan navigasi. Ini akan merangkumi rangkaian wayarles tempatan untuk memudahkan komunikasi dari permukaan bulan ke Bumi (atau orbit) memberikan kuasa untuk rover dan dirinya sendiri, dan membantu dalam operasi saintifik dengan makmal yang berada di dalam kapal.
Walaupun robot ini dapat dikendalikan jauh dari Bumi, seni bina misi dirancang dengan mempertimbangkan Lunar Gateway. Habitat ini - yang sedang dikembangkan oleh NASA, ESA, dan konsortium rakan antarabangsa - akan menjadi pos manusia pertama di luar orbit Bumi dan berfungsi sebagai basecamp untuk operasi di permukaan bulan.
Ini termasuk kembalinya NASA ke Bulan (Project Artemis) dan Senibina Robotik Manusia yang Disempurnakan dan Keupayaan ESA untuk pendaratan dan pelayaran Lunar Eksplorasi dan Sains (HERACLES). Dan tentu saja, ada rancangan jangka panjang ESA, bersama dengan agensi angkasa lain dan rakan antarabangsa, untuk mewujudkan International Moon Village yang telah lama ditunggu-tunggu.
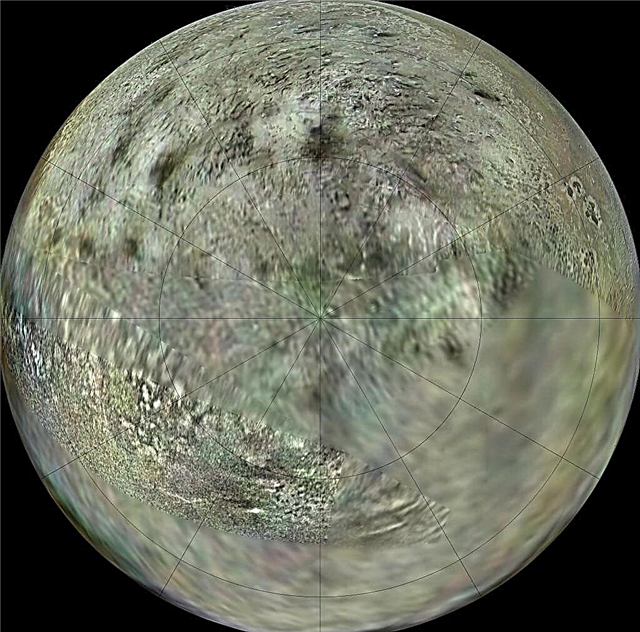
Dalam semua keadaan, kejayaan akan berpunca daripada kerjasama; bukan hanya antara agensi dan antara entiti awam dan swasta, tetapi antara angkasawan dan penjelajah robot juga. Apabila PELATIH selesai, ia akan bergabung dengan sejumlah misi robotik di Lembangan Kutub-Aitken Selatan yang akan meneroka sumber yang dapat digunakan untuk menyokong operasi manusia - alias. Penggunaan Sumber Dalam Situasi (ISRU).
ESA juga sedang terlibat dalam pengembangan infrastruktur komando jenis baru dan sistem kawalan kekuatan-maklum balas yang akan memungkinkan angkasawan untuk “merasakan” apa yang dirasakan oleh penumpang. Sebagai sebahagian daripada eksperimen Analog-1, angkasawan ESA Luca Parmitano berjaya menunjukkan kemampuan sistem untuk mengendalikan pelayaran di Bumi dari ISS.
Pembangunan TRAILER akan dipimpin oleh COMEX dengan sokongan yang diberikan oleh Pusat Penyelidikan Jerman untuk Pusat Inovasi Robotik Kecerdasan Buatan (DFKI RIC) dan syarikat robotik yang berpangkalan di Vienna, LIQUIFER Systems Group.