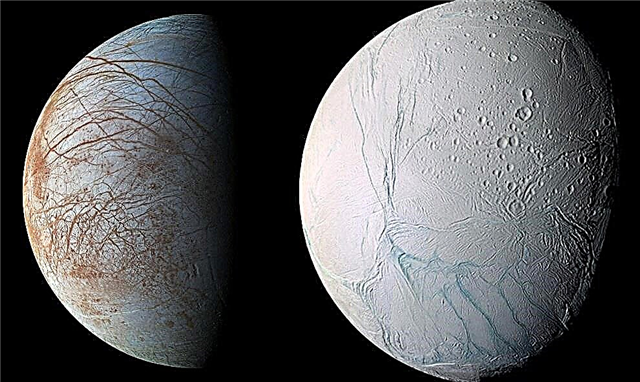
Mikro Bot Planet. Kredit gambar: NASA Klik untuk membesarkan
Temu ramah dengan Penny Boston, Bahagian I
Sekiranya anda ingin pergi ke bintang jauh, atau mencari kehidupan di dunia lain, memerlukan sedikit perancangan. Itulah sebabnya NASA telah menubuhkan NIAC, Institut Konsep Lanjutan NASA. Selama beberapa tahun kebelakangan ini, NASA mendorong para saintis dan jurutera untuk berfikir di luar kotak, untuk mengemukakan idea hanya dari sisi fiksyen sains ini. Harapan mereka adalah bahawa beberapa idea ini akan muncul dan memberi agensi itu teknologi yang dapat digunakannya selama 20, 30, atau 40 tahun.
NIAC menyediakan dana secara kompetitif. Hanya sebilangan kecil daripada cadangan yang dikemukakan dibiayai. Pembiayaan Tahap I adalah minimum, cukup bagi para penyelidik untuk menyusun idea mereka di atas kertas. Sekiranya idea itu menunjukkan kebaikan, ia mungkin akan mendapat dana Tahap II, yang memungkinkan penyelidikan itu berlanjutan dari konsep murni hingga tahap prototaip kasar.
Salah satu projek yang mendapat pendanaan Tahap II awal tahun ini adalah kerjasama antara Dr. Penelope Boston dan Dr. Steven Dubowsky untuk mengembangkan "robot mikro" yang mampu menjelajahi kawasan berbahaya, termasuk gua bawah tanah. Sekiranya projek ini berhenti, mikrobot melompat mungkin akan dihantar untuk mencari kehidupan di bawah permukaan Marikh.
Boston menghabiskan banyak masa di gua, mempelajari mikroorganisma yang tinggal di sana. Dia adalah pengarah Program Pengajian Gua dan Karst dan profesor bersekutu di New Mexico Tech di Socorro, New Mexico. Dubowsky adalah pengarah Makmal Robotik Lapangan dan Angkasa MIT di MIT, di Cambridge, Massachusetts. Dia terkenal sebahagiannya untuk penyelidikan otot tiruan.
Majalah Astrobiologi menemu ramah Boston sejurus selepas dia dan Dubowsky menerima pemberian Tahap II NIAC mereka. Ini adalah yang pertama dari temu ramah dua bahagian. Astrobiology Magazine (AM): Anda dan Dr. Steven Dubowsky baru-baru ini mendapat dana dari NIAC untuk mengusahakan idea menggunakan robot mini untuk meneroka gua bawah permukaan di Marikh? Bagaimana projek ini dapat dilaksanakan?
Penny Boston (PB): Kami telah melakukan banyak pekerjaan di gua-gua di Bumi dengan mata melihat penduduk mikroba di persekitaran unik ini. Kami fikir mereka dapat berfungsi sebagai templat untuk mencari bentuk kehidupan di Marikh dan badan luar angkasa lain. Saya menerbitkan sebuah makalah pada tahun 1992, dengan Chris McKay dan Michael Ivanov, menunjukkan bahawa permukaan bawah Mars akan menjadi tempat perlindungan terakhir kehidupan di planet itu kerana ia menjadi lebih sejuk dan kering sepanjang masa geologi. Itu membawa kita ke dalam perniagaan untuk melihat ke bawah permukaan bumi. Semasa kami melakukannya, kami mendapati bahawa terdapat sebilangan besar organisma yang nampaknya berasal dari permukaan bawah tanah. Mereka berinteraksi dengan mineralogi dan menghasilkan biosignature yang unik. Oleh itu, ia menjadi kawasan yang sangat subur untuk kita belajar.
Tidak semudah itu, masuk ke gua yang sukar di planet ini. Menterjemahkannya ke misi luar angkasa robotik memerlukan beberapa pemikiran. Kami mempunyai data pengimejan yang baik dari Mars yang menunjukkan bukti geomorfologi yang berbeza untuk sekurang-kurangnya gua tiub lava. Oleh itu, kita tahu bahawa Mars mempunyai sekurang-kurangnya satu jenis gua yang boleh menjadi sasaran ilmiah yang berguna untuk misi masa depan. Adalah masuk akal untuk berfikir bahawa ada juga jenis gua yang lain dan kami mempunyai makalah yang diterbitkan dalam Kertas Khas Persatuan Geologi Amerika yang akan meneroka mekanisme pembentukan gua (speleogenetik) yang unik di Marikh. Titik utama adalah bagaimana untuk berkeliling di kawasan yang sukar dan sukar.
AM: Bolehkah anda menerangkan apa yang anda buat pada fasa pertama projek ini?
PB: Pada Tahap I, kami ingin memusatkan perhatian pada unit robot yang kecil, sangat banyak (oleh itu dapat dibelanjakan), sebahagian besarnya bersifat autonomi, dan memiliki mobiliti yang diperlukan untuk memasuki wilayah yang lasak. Berdasarkan hasil kerja Dr. Dubowsky yang berterusan dengan gerakan robotik yang diaktifkan otot buatan, kami mendapat idea mengenai banyak, banyak bola kecil, mengenai ukuran bola tenis, yang pada dasarnya melompat, hampir seperti kacang melompat Mexico. Mereka menyimpan tenaga otot, dan kemudian mereka mengeluarkan diri dari pelbagai arah. Begitulah cara mereka bergerak.
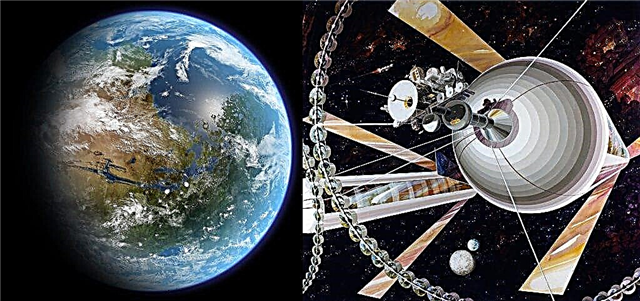
kredit: Render oleh R.D.Gus Frederick
Pengaturan Planet Untuk Eksplorasi Permukaan & Permukaan Bawah Tanah Berskala Besar. Klik gambar untuk paparan yang lebih besar.
Kredit Imej: Render oleh R.D.Gus Frederick
Kami telah mengira bahawa kami mungkin dapat mengumpulkan kira-kira seribu orang ini ke dalam jumlah muatan seukuran salah satu MER semasa (Mars Exploration Rovers). Itu akan memberi kita fleksibiliti untuk mengalami kehilangan sebagian besar unit dan masih memiliki jaringan yang dapat melakukan pengintaian dan penginderaan, pencitraan, dan bahkan mungkin beberapa fungsi sains lain.
AM: Bagaimana semua bidang kecil ini berkoordinasi antara satu sama lain?
PB: Mereka bertindak sebagai kawanan. Mereka saling berhubungan menggunakan peraturan yang sangat sederhana, tetapi itu menghasilkan banyak kelenturan dalam tingkah laku kolektif mereka yang memungkinkan mereka memenuhi tuntutan medan yang tidak dapat diramalkan dan berbahaya. Produk utama yang kami impikan adalah armada anak-anak kecil ini yang dihantar ke beberapa lokasi pendaratan yang menjanjikan, keluar dari pendarat dan kemudian menuju ke beberapa permukaan bawah tanah atau kawasan berbahaya lain, di mana mereka menggunakan diri mereka sebagai rangkaian. Mereka membuat rangkaian komunikasi selular, berdasarkan node-to-node.
AM: Adakah mereka dapat mengawal arah di mana mereka melompat?
PB: Kami mempunyai cita-cita agar mereka akhirnya mampu. Semasa memasuki Fasa II, kami bekerjasama dengan Fritz Printz di Stanford pada sel bahan bakar ultra mini untuk memberi tenaga kepada anak-anak kecil ini, yang akan membolehkan mereka dapat melakukan pelbagai perkara yang cukup kompleks. Salah satu keupayaan tersebut adalah mempunyai kawalan terhadap arah yang mereka tuju. Terdapat cara-cara tertentu yang boleh dibina yang membolehkan mereka memilih ke arah satu arah atau ke arah lain. Tidak begitu tepat sekiranya mereka adalah penunggang beroda hanya berjalan di jalan lurus. Tetapi mereka boleh memilih sendiri lebih kurang ke arah yang ingin mereka tuju. Oleh itu, kami membayangkan bahawa mereka akan mempunyai kawalan kasar terhadap arahan. Tetapi banyak nilai mereka ada hubungannya dengan gerakan kawanan mereka sebagai awan yang berkembang.
Sama hebatnya dengan penemu MER, untuk jenis sains yang saya lakukan, saya memerlukan sesuatu yang lebih mirip dengan idea robot serangga yang dipelopori oleh Rodney Brooks di MIT. Mampu memanfaatkan model kecerdasan serangga dan penyesuaian untuk penerokaan telah lama menarik perhatian saya. Menambahnya dengan mobiliti unik yang diberikan oleh idea melompat Dr Dubowsky, saya fikir, dapat memungkinkan peratusan unit kecil ini dapat bertahan dari bahaya permukaan bawah tanah - yang sepertinya kombinasi ajaib bagi saya.
HB: Jadi pada Tahap I, adakah ini benar-benar dibina?
PB: Tidak. Tahap I, dengan NIAC, adalah kajian penekanan pensil otak selama enam bulan, untuk melingkupi canggih teknologi yang relevan. Pada Tahap II, kami akan melakukan prototaip dan ujian lapangan dalam jumlah yang terbatas, dalam jangka masa dua tahun. Ini jauh lebih sedikit daripada yang mungkin diperlukan oleh seseorang untuk misi sebenarnya. Tetapi, tentu saja, itu adalah mandat NIAC, untuk mengkaji teknologi 10 hingga 40 tahun. Kami fikir ini mungkin dalam lingkungan 10 hingga 20 tahun.
AM: Apa jenis sensor atau peralatan saintifik yang anda bayangkan dapat memakai barang-barang ini?
PB: Pengimejan jelas merupakan sesuatu yang ingin kita lakukan. Oleh kerana kamera menjadi sangat kecil dan kuat, sudah ada unit dalam ukuran yang dapat dipasang pada benda-benda ini. Mungkin beberapa unit dapat dilengkapi dengan kemampuan pembesaran, sehingga seseorang dapat melihat tekstur bahan yang mereka naiki. Menggabungkan gambar yang diambil oleh kamera kecil pada banyak unit kecil yang berbeza adalah salah satu bidang untuk pembangunan masa depan. Itu di luar ruang lingkup projek ini, tetapi itulah yang kami fikirkan untuk pengimejan. Dan kemudian, tentu sensor kimia, dapat menghidu dan merasakan persekitaran kimia, yang sangat kritikal. Segala-galanya dari hidung laser kecil hingga elektrod terpilih ion untuk gas.
Kami membayangkan agar mereka tidak semua identik, melainkan sebuah ensemble, dengan cukup banyak jenis unit yang dilengkapi dengan berbagai jenis sensor sehingga kebarangkalian masih tinggi, walaupun diberi kerugian jumlah unit yang cukup tinggi, bahawa kita masih mempunyai rangkaian sensor yang lengkap. Walaupun setiap unit tidak dapat memiliki muatan sensor yang besar, anda dapat memiliki cukup sehingga dapat memberikan tumpang tindih yang signifikan dengan unit-unitnya yang lain.
AM: Adakah mungkin melakukan ujian biologi?
PB: Saya rasa begitu. Terutama jika anda membayangkan jangka masa yang sedang kita lihat, dengan kemajuan yang ada dalam talian dengan segala-galanya dari titik kuantum hingga peranti lab-on-a-chip. Sudah tentu, kesukaran mendapatkan bahan sampel kepada mereka. Tetapi ketika kita berurusan dengan unit kecil yang bersentuhan dengan darat seperti microbots hopping kami, anda mungkin dapat meletakkannya secara langsung di atas bahan yang ingin mereka uji. Dalam kombinasi dengan mikroskopi dan imejan bidang yang lebih luas, saya berpendapat bahawa kemampuannya ada untuk melakukan kerja biologi yang serius.
AM: Adakah anda mempunyai idea tentang apa pencapaian yang anda ingin capai selama dua tahun projek anda?
PB: Kami menjangkakan bahawa pada bulan Mac kami mungkin mempunyai prototaip kasar yang mempunyai mobiliti yang berkaitan. Tetapi itu mungkin terlalu bercita-cita tinggi. Sebaik sahaja kami mempunyai unit mudah alih, rancangan kami adalah melakukan ujian lapangan di gua-gua tabung lava sebenar yang kami lakukan sains di New Mexico.
Tapak lapangan sudah diuji. Sebagai sebahagian daripada Tahap I kumpulan MIT keluar dan saya mengajar mereka sedikit tentang gua dan bagaimana rupa bentuknya. Itu adalah pembuka mata yang besar bagi mereka. Adalah satu perkara untuk merancang robot untuk ruang MIT, tetapi satu lagi perkara untuk merancangnya untuk persekitaran berbatu di dunia nyata. Itu adalah pengalaman yang sangat mendidik bagi kita semua. Saya rasa mereka mempunyai idea yang cukup baik apa syaratnya mereka harus memenuhi rancangan mereka.
AM: Apakah syarat-syarat itu?
PB: Medan yang sangat tidak rata, banyak celah yang dapat dimasuki oleh orang-orang ini buat sementara waktu. Oleh itu, kita memerlukan mod operasi yang membolehkan mereka mengasingkan diri, sekurang-kurangnya dengan peluang kejayaan yang munasabah. Cabaran komunikasi penglihatan dalam permukaan yang sangat kasar. Mengalahkan batu besar. Terjebak dalam celah-celah kecil. Perkara semacam itu.
Lava tidak halus. Bahagian dalam tiub lava secara intrinsik licin setelah dibentuk, tetapi terdapat banyak bahan yang menyusut dan retak dan jatuh. Jadi ada timbunan runtuhan untuk berkeliling dan banyak perubahan ketinggian. Dan ini adalah perkara yang tidak mampu dilakukan oleh robot konvensional.
Sumber Asal: Astrobiologi NASA