Laboratorium Jet Propulsion NASA baru-baru ini mengumumkan bahawa ia sedang membangunkan helikopter drone kecil untuk mencari jalan untuk penumpang Mars masa depan. Mengapa rover Mars memerlukan panduan robotik seperti itu? Jawapannya ialah memandu di Marikh sungguh sukar.
Di Bumi, robot yang meneroka pelekap gunung berapi, atau membantu penyelamat, dapat dikendalikan dengan alat kawalan jauh, dengan kayu bedik. Ini kerana isyarat radio menjangkau robot dari pusat kawalannya dengan serta-merta. Memandu di bulan tidak lebih sukar. Isyarat radio yang bergerak dengan kelajuan cahaya mengambil masa sekitar dua setengah saat untuk melakukan perjalanan pergi balik ke bulan dan kembali. Kelewatan ini tidak cukup lama untuk mengganggu pemanduan alat kawalan jauh. Pada tahun 1970-an pengawal Soviet mengemudi penunggang bulan Lunokhod dengan cara ini, berjaya menjelajah lebih dari 40 km medan lunar.
Memandu di Marikh jauh lebih sukar, kerana jauh lebih jauh. Bergantung pada kedudukannya sehubungan dengan Bumi, isyarat memerlukan masa antara 8 dan 42 minit untuk perjalanan pergi dan balik. Arahan yang diprogramkan mesti dihantar ke rover, yang kemudian dilaksanakan sendiri. Setiap perjalanan Martian memerlukan berjam-jam merancang dengan teliti. Imej stereo yang diambil oleh kamera navigasi rover diteliti dengan teliti oleh jurutera. Imej dari kapal angkasa yang mengorbit Mars kadang-kadang memberikan maklumat tambahan.
Rover dapat diprogram untuk menjalankan senarai perintah memandu yang dikirim dari Bumi, atau menggunakan gambar yang diambil oleh kamera navigasi dan diproses oleh komputernya untuk mengukur kelajuan dan mengesan halangan atau bahaya dengan sendirinya. Ia bahkan dapat merancang jalan selamatnya sendiri ke tujuan yang ditentukan. Pemacu berdasarkan petunjuk dari tanah adalah yang terpantas.
Semangat dan Peluang Penjelajah Mars Eksplorasi dapat melaju hingga 124 meter dalam satu jam dengan cara ini. Ini sesuai dengan panjang padang bola Amerika. Tetapi mod ini juga paling tidak selamat.
Apabila rover bergerak secara aktif menggunakan kameranya, kemajuannya lebih selamat, tetapi lebih perlahan kerana semua proses pemprosesan gambar diperlukan. Ia mungkin bergerak sejauh 10 meter sejam, iaitu kira-kira jarak dari garis gawang ke garis 10 yard di padang bola Amerika. Kaedah ini mesti digunakan setiap kali rover tidak memiliki pandangan yang jelas mengenai jalan di depan, yang sering terjadi kerana kawasan yang kasar dan berbukit.
Pada awal tahun 2015, rasa ingin tahu yang paling jauh telah dipacu dalam satu hari ialah 144 meter. Perjalanan terpanjang harian Peluang adalah 224 meter, jarak dua padang bola Amerika.
Sekiranya pengawal darat dapat memperoleh pandangan yang lebih baik mengenai jalan di depan, mereka dapat menyusun arahan yang membolehkan pelumba masa depan untuk memandu dengan lebih jauh dalam sehari.
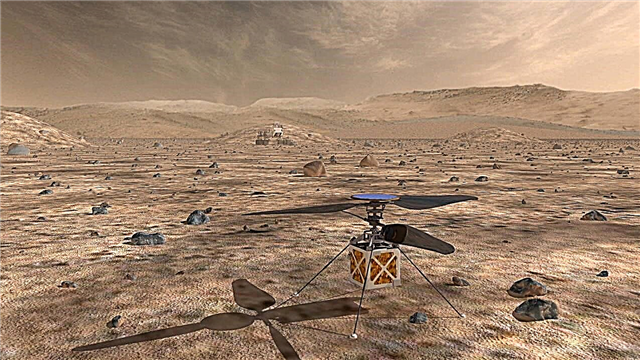
Di situlah idea mengenai helikopter drone masuk. Helikopter boleh terbang di hadapan rover setiap hari. Imej yang dibuat dari sudut pandang udara akan sangat berharga bagi pengendali darat untuk mengenal pasti tempat-tempat menarik ilmiah, dan merancang laluan pemanduan ke sana.
Menaiki helikopter di Marikh menimbulkan cabaran khusus. Satu kelebihannya ialah graviti Mars hanya 38% sekuat Bumi, sehingga helikopter tidak perlu menjana daya angkat sebanyak jisim yang sama di Bumi. Bilah baling-baling helikopter menghasilkan daya angkat dengan mendorong udara ke bawah. Ini lebih sukar dilakukan di Marikh daripada di Bumi, kerana atmosfer Mars lebih ratus kali lebih tipis. Untuk menggantikan udara yang cukup, bilah baling-baling perlu berputar dengan cepat, atau menjadi sangat besar.
Copter mesti mampu terbang sendiri, menggunakan arahan sebelumnya, mengekalkan penerbangan stabil di sepanjang laluan yang ditentukan sebelumnya. Ia mesti mendarat dan berlepas berulang kali di medan berbatu Martian. Akhirnya mesti mampu bertahan dalam keadaan yang teruk di Mars, di mana suhu menjunam hingga 100 darjah Fahrenheit atau lebih rendah setiap malam.
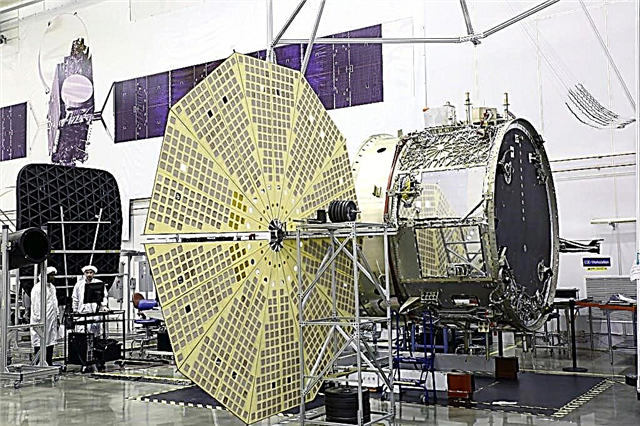
Jurutera JPL merancang mesin pemotong dengan jisim 1 kilogram; sebilangan kecil jisim 900 kg jelajah Curiosity. Bilah baling-balingnya menjangkau 1,1 meter dari hujung pisau ke ujung bilah, dan mampu berputar pada 3400 putaran seminit. Tubuh kira-kira seukuran kotak tisu.
Copter bertenaga solar, dengan cakera sel suria mengumpulkan tenaga yang cukup setiap hari untuk menggerakkan penerbangan dua hingga tiga minit dan memanaskan kenderaan pada waktu malam. Ia dapat terbang sekitar setengah kilometer pada waktu itu, mengumpulkan gambar untuk dihantar ke pengendalian darat ketika berjalan. Jurutera menjangkakan bahawa pengintaian yang dikumpulkan oleh helikopter drone akan sangat berharga dalam merancang pemanduan rover, menggandakan jarak yang dapat ditempuh dalam sehari.
Rujukan dan bacaan selanjutnya:
Terima kasih kepada Mark Maimone dari NASA Jet Propulsion Laboratory untuk maklumat mengenai jarak ingin tahu dan Peluang memandu harian.
J.J. Biesiadecki, P. C. Leger, dan M.W. Maimone (2007), 'pertukaran antara pemanduan yang diarahkan dan autonomi pada rover eksplorasi Marikh', The International Journal of Robotics Research, 26 (1), 91-104
E. Howell, rover Opportunity Mars mengembara sejauh 41 kilometer menuju ‘Marathon Valley’, Space Magazine, Disember 2014.
T. Reyes, Perjalanan yang luar biasa, Mars Curiosity rover sampai di dasar Gunung Sharp. Majalah Angkasa, September 2014.
Helikopter boleh menjadi 'pengakap' bagi pelumba Mars. Siaran Akhbar Makmal Propulsion NASA. 22 Januari 2015.
Kejuruteraan Gila: Helikopter Mars. Video Makmal Jet Propulsion NASA.
Curiosity- Mars Science Laboratory, NASA.
Rancangan Mars- Future rover. NASA