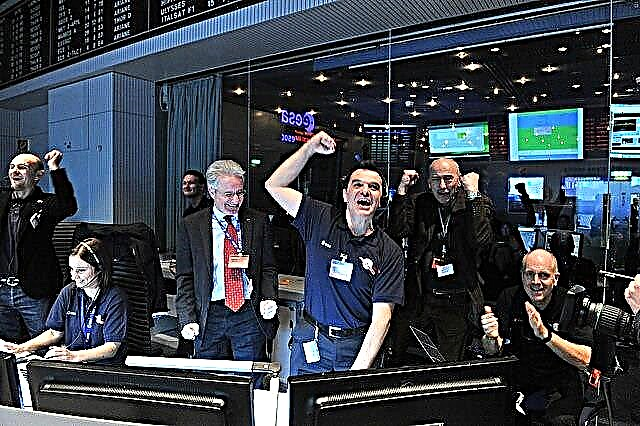
Keheningan dari suapan video langsung dari pusat operasi ruang angkasa ESA di Darmstadt, Jerman hampir memekakkan telinga. Akhirnya, setelah menunggu hampir 45 minit ke jendela waktu ketika kapal angkasa itu seharusnya menghantar isyarat, sedikit kelip muncul di layar penganalisis spektrum dan ruangan itu meletus dengan sorakan.

"Setelah menunggu lebih dari dua setengah tahun, apa itu tiga perempat jam!" kata Fred Jansen, pengurus misi Rosetta ESA. "Kapal angkasa ada di sana, sudah bangun dan pasukan sains tahu ada dua tahun sibuk di hadapan mereka. Sekarang kita harus bekerja keras. Terima kasih kepada pasukan yang mencapainya. "
"Saya rasa saya boleh bercakap bagi semua orang di sini dan semua orang di Twitter: itu agak tertekan!" kata Matt Taylor, saintis projek Rosetta. "Kerja bermula sekarang dan saya rasa kita akan bersenang-senang dua tahun ke depan, jadi mari kita teruskan!"
Segera setelah isyarat tiba, umpan Twitter misi menjadi hidup, Tweet "Hello World" dalam pelbagai bahasa.
Labas, pasauli!
- Misi ESA Rosetta (@ESA_Rosetta) 20 Januari 2014
Antena saya mula bergemuruh beberapa jam yang lalu dengan semua mesej #wakeuprosetta yang menjerit dan indah. Terima kasih!
- Misi ESA Rosetta (@ESA_Rosetta) 20 Januari 2014
Kemudian pada hari itu, ketika pasukan memeriksa kapal angkasa, semuanya kelihatan teratur dan berfungsi dengan baik kerana sistem mula beroperasi:
Pengurus Operasi #Rosettta Andrea Accomazzo telah melihat data ... kami kelihatan baik!
- Operasi ESA (@esaoperations) 20 Januari 2014
Rosetta dimasukkan ke dalam hibernasi pada bulan Jun 2011, dengan hanya komputer dan beberapa pemanas yang masih aktif ketika kapal angkasa itu berlayar sejauh hampir 800 juta km dari kehangatan Matahari, di luar orbit Musytari.
Hari ini, ketika orbit Rosetta kembali berada dalam jarak 673 juta km dari Matahari, terdapat tenaga suria yang cukup untuk menggerakkan kapal angkasa sepenuhnya dan ‘jam penggera’ dalaman yang diprogramkan oleh Rosetta membangunkan kapal angkasa itu setelah merakam hibernasi selama 957 hari. Setelah memanaskan instrumen navigasi utamanya, keluar dari putaran stabil, dan mengarahkan antena radio utamanya di Bumi, Rosetta mengirim isyarat untuk memberi tahu operator misi bahawa ia telah bertahan di bahagian paling jauh dari perjalanannya.
Isyarat itu diterima oleh stesen darat Goldstone NASA di California pada pukul 18:18 GMT semasa peluang pertama kapal angkasa itu harus berkomunikasi dengan Bumi.
Waktu cahaya sehala pada hari ini, 20 Januari 2014 antara Rosetta dan Bumi adalah sekitar 44 minit dan 53 saat pada jarak 807,224,610,74 km. Rosetta berada sekitar 9,188,540 km dari komet, ditutup pada jarak sekitar 800 m / saat.
"Ini adalah satu jam penggera untuk tidak tertunda, dan setelah hari yang tegang, kami sangat gembira apabila kapal angkasa kita terjaga dan kembali dalam talian," kata Jansen.
Komet dianggap sebagai blok bangunan primitif Sistem Suria dan mungkin telah membantu 'membenamkan' Bumi dengan air, atau bahkan bahan untuk hidup. Tetapi banyak persoalan mendasar mengenai objek-objek misteri ini tetap ada, dan melalui kajian in situ Komet 67P / Churyumov-Gerasimenko yang komprehensif, Rosetta bertujuan untuk membuka rahsia yang terdapat di dalamnya.
"Semua misi komet lain telah terbang, menangkap momen sekejap dalam kehidupan peti harta karun ini," kata Taylor. "Dengan Rosetta, kami akan melacak evolusi komet setiap hari dan selama lebih dari satu tahun, memberikan kami gambaran yang unik tentang tingkah laku komet dan akhirnya membantu kami menguraikan peranan mereka dalam pembentukan Sistem Suria."
Oleh itu! #WakeUpRosetta Flug frei für @ Philae2014. Der Lander soll im November auf dem Kometen aufsetzen (AS) pic.twitter.com/ZlN9ZhIQJP
- DLR_de (@DLR_de) 20 Januari 2014
Tetapi pertama, pemeriksaan kesihatan penting di kapal angkasa mesti diselesaikan. Kemudian sebelas instrumen di orbit dan sepuluh di lander akan dihidupkan dan disiapkan untuk mempelajari Komet 67P / Churyumov-Gerasimenko.
"Kami sibuk beberapa bulan ke depan untuk menyiapkan kapal angkasa dan instrumennya untuk menghadapi cabaran operasi yang dituntut oleh kajian komet yang panjang dan dekat yang, sehingga kita sampai di sana, kita tidak banyak tahu," kata Andrea Accomazzo, operasi Rosetta pengurus.
Gambar pertama Rosetta 67P / Churyumov-Gerasimenko dijangka pada bulan Mei, ketika kapal angkasa masih 2 juta km dari sasarannya. Menjelang akhir bulan Mei, kapal angkasa itu akan melakukan manuver utama untuk bersaing dengan pertemuan kometnya pada bulan Ogos.
Selepas pertemuan, Rosetta akan memulakan dengan dua bulan pemetaan luas permukaan komet, dan juga akan membuat pengukuran penting terhadap graviti, jisim dan bentuk komet, dan menilai atmosfera, atau koma yang penuh dengan gas, debu. Pengorbit juga akan memeriksa persekitaran plasma dan menganalisis bagaimana ia berinteraksi dengan atmosfera luar Matahari, angin suria.
Dengan menggunakan data ini, saintis akan memilih lokasi pendaratan untuk penyelidikan Philae 100 kg misi. Pendaratan sekarang dijadualkan pada 11 November 2014 dan akan menjadi kali pertama pendaratan komet dilakukan.
Dengan graviti yang hampir tidak dapat dielakkan dari nukleus selebar 4 km komet, Philae harus menggunakan skru ais dan kecapi untuk menghentikannya daripada kembali ke angkasa selepas turun.
Di antara pengukuran saintifiknya yang luas, Philae akan menghantar kembali panorama sekitarnya, serta gambar permukaan yang beresolusi tinggi. Ia juga akan melakukan analisis langsung mengenai komposisi es dan bahan organik, termasuk penggerudian hingga 23 cm di bawah permukaan dan pengambilan sampel ke makmal kapal Philae untuk dianalisis.
Fokus misi kemudian akan beralih ke fasa 'pengawalan', di mana Rosetta akan tetap berada di samping komet ketika bergerak mendekati Matahari, memantau keadaan yang selalu berubah di permukaan ketika komet menghangat dan esnya menyala.
Rosetta akan mengikuti komet sepanjang baki tahun 2015, ketika ia menjauh dari Matahari dan aktiviti mulai reda.
Anda boleh membaca blog pasukan mengenai "bangun" di sini, dan mengetahui lebih lanjut mengenai misi Rosetta di sini.
Berikut adalah pengulangan pemerolehan isyarat: